
Tesla añadirá un nuevo radar a su sistema de conducción autónoma que tendrá el doble de alcance de su radar actual que sería capaz de ver lo que ocurre por delante del coche hasta a 300 metros de distancia. Además, el software que procesa los datos que llegan desde este nuevo equipo sería capaz de crear un mapa del entorno en 4D, es decir en las tres dimensiones del espacio más una cuarta, el tiempo, de manera que lo que se obtiene es esencialmente un 'vídeo del entorno'.
El Autopilot de Tesla basa su funcionamiento en la instrumentación situada alrededor de todo el coche y el software que recoge los datos que trata esta información, actúa sobre los controles del coche y envía mensajes al conductor. Desde el principio, Elon Musk ha decidido eliminar de estos equipos los sensores LiDAR que todo el resto de fabricantes utilizan en sus sistemas. El directivo ha insistido que no se trata de una razón de coste económico, puesto que hace poco aseguró que no los emplearía ni aunque fuesen gratuitos.
Desde 2016, todos los vehículos de Tesla han sido equipados con un conjunto de 12 sensores ultrasónicos, ocho cámaras y un radar. Durante los años posteriores estos equipos han ido actualizándose y recibiendo mejoras, aunque su número y situación no ha cambiado.

Así ve el Autopilot de Tesla su entorno.
El radar situado en la parte frontal es el modelo ARS410 de Continental. Tiene un alcance de hasta 160 metros permitiendo detectar vehículos y objetos incluso en las condiciones climáticas más adversas, que dificultan el trabajo de las cámaras. Es capaz de posicionar y de calcular la velocidad relativa de estos vehículos y objetos respeto al coche, y es el pilar fundamental para el control de crucero adaptativo.
La información que se ha filtrado indica que Tesla está buscando actualizar este radar con una nueva tecnología de sensores 4D de una startup israelí llamada Arbe Robotics. Al estudiar sus actualizaciones de software, un conocido 'pirata informático' que se comunica a través de Twitter bajo el usuario @green, ha encontrado indicios de que el fabricante de automóviles ha agregado una nueva opción de radar llamada 'Phoenix', que es el nombre del radar de Arbe.
Según la página web de Arbe, Phoenix "atiende las necesidades de conducción del mundo real identificando, evaluando y respondiendo a escenarios desafiantes desde lo común hasta lo excepcional". Es capaz de crear imágenes en tiempo real, en alta resolución, sin que influya la velocidad, la elevación, la proximidad, el clima circundante o las condiciones de iluminación. "Este radar es capaz de diferenciar las amenazas verdaderas de las falsas alarmas y garantizar un camino seguro para los conductores, peatones y otros usuarios vulnerables de la carretera".



Tecnología del radar Phoenix de la empresa israelí Arbe.
Respecto al chip de procesamiento de este nuevo radar, Arbe asegura que es capaz de trabajar con cantidades masivas de datos en tiempo real manteniendo un bajo consumo de energía. Según sus especificaciones duplica el alcance del radar actual, llegando a ver por delante del coche hasta a 300 metros de distancia.
La llamada 'resolución 4D' se refiere a que es capaz de tratar imágenes y correlacionarlas para crear un entorno en tres dimensiones (3D) y agregar una cuarta dimensión (4D) que sería el tiempo. Así, transformaría un mapa del entorno para convertirlo esencialmente en un vídeo. De esta forma, el Autopilot de Tesla sería capaz de evaluar la "la distancia, la altura, la profundidad y la velocidad de manera simultánea y en alta resolución".
Cámaras y sensores del Autopilot que apoyan la labor del radar
De las ocho cámaras, tres están situadas tras el parabrisas. La cámara amplia tiene una lente ojo de pez de 120 grados, que se emplea para las maniobras realizadas a baja velocidad en entornos urbanos. Es la encargada de reconocer los semáforos, las señales de tráfico, los obstáculos y los distintos objetos del entorno en una distancia máxima de 60 metros. La cámara principal, la más polivalente sirve para cubrir el rango de distancias entre la anterior y aproximadamente los 150 metros. Por último, cuenta con la de visión más estrecha y largo alcance, útil a altas velocidades, que reconoce obstáculos desde los 150 a los 250 metros por delante del coche.
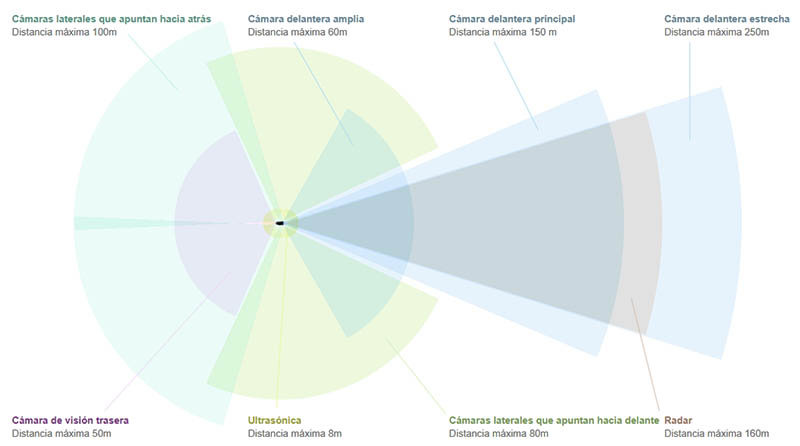
Conjunto de cámaras, sensores y radares de un Tesla.
En cada lateral se montan dos cámaras con visión frontal y trasera. Las primeras con un ángulo de visión de 90 grados y un alcance de 60 metros, detectan los vehículos que se incorporan al carril propio y aportan información sobre las intersecciones con poca visibilidad. Las que están dotadas de visión trasera supervisan los puntos ciegos traseros a ambos lados del vehículo alimentando la información que requiere el sistema de aviso de vehículo en el ángulo muerto para las incorporaciones a otro carril. Por último, la cámara de visión trasera, además de ayudar a aparcar, es capaz de ver 50 metros hacia atrás para hacer funcionar la función 'Smart Summon'.
Los 12 sensores ultrasónicos con un rango de visión de hasta ocho metros tras la última actualización, detectan objetos sólidos y blandos y sirven tanto como sensores de aparcamiento como para detectar vehículos cercanos alrededor del coche cuando este se encuentra en movimiento.